Wave Propagation in a Coupled PFC-FLAC3D model
Problem Statement
Note
The project file for this example may be viewed/run.[1] The main data file used is shown at the end of this example.
The following example illustrates plane wave propagation through a one-dimensional “bar” using PFC-FLAC3D coupling. The bar is composed of particles bonded together on the left hand side of the system, and of zones on the right hand side. The left-hand end is a “quiet boundary” that absorbs any incident waveform. The PFC and FLAC3D regions overlap over a specified length, where they are coupled using the Ball-Zone coupling scheme. An input pulse is also injected at the left-hand boundary.
Numerical Model
The data file “wave_cpl.dat” simulates wave propagation in a bar made up of a coupled PFC-FLAC3D system. The time history of the input pulse is
where \(A\) is the amplitude of the pulse and \(f\) is the frequency. The duration of the pulse is 1\(/f\), and \(U̇\) (the velocity applied to the PFC model) is set to zero after the duration of the pulse. Parameters \(R, ρ, C, f\), and \(A\) are set in the initial section of “wave_cpl.dat”.
When the data files are executed with PFC, the time histories reproduced in Figure 1 is generated.
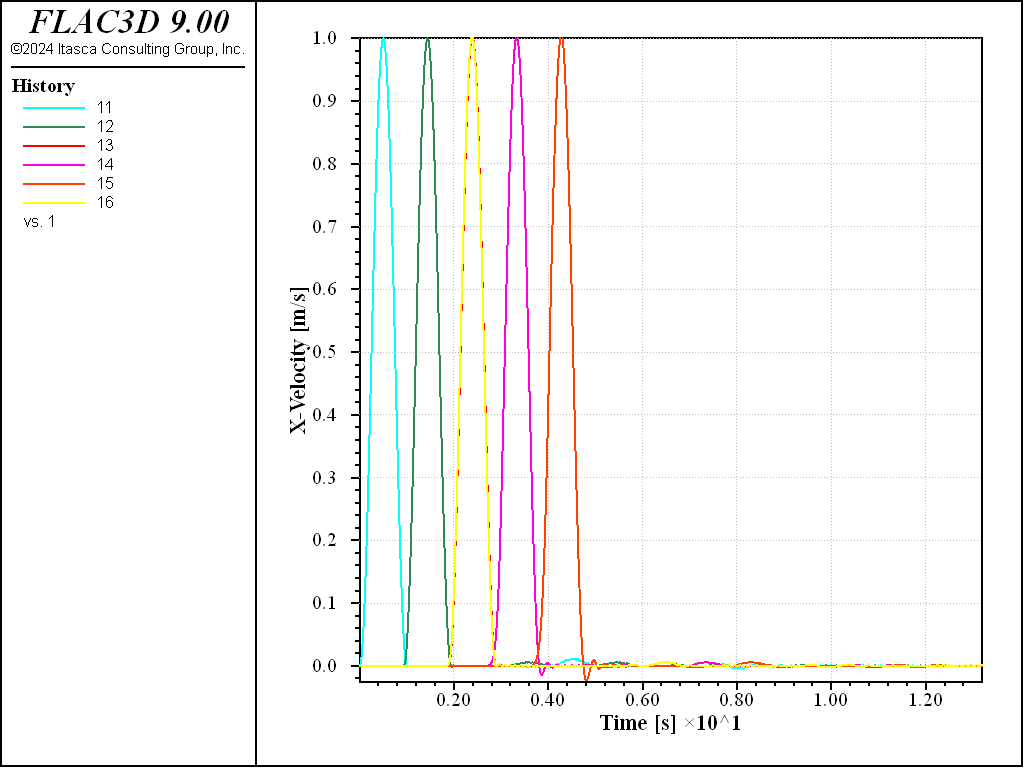
Figure 1: Velocity histories.
Data File
wave_cpl.dat
model new
model configure dynamic
model large-strain on
[wfreq = 1.0 ] ; pulse frequency [1/s]
[wpeak = 1.0 ] ; pulse peak velocity [m/s]
[rho = 2700.0 ]
[emod = 75.0e9 ]
[nu = 0.25]
[kappa = 15.0]
[mmod = emod*(1-nu)/((1+nu)*(1-2.0*nu))
[cp = math.sqrt(mmod/rho)] ; p-wave velocity [m/s]
[cs = math.sqrt(emod/(2.0*rho*(1+nu)))] ; s-wave velocity [m/s]
[lambda = cp/(wfreq)]
[l5 = cs/(5.0)]
[rad = 0.5*(l5/kappa)]
[rhob = 6.0/math.pi*rho ]
[l = 4.0*lambda]
[nb = 5]
[h = nb*2.0*rad]
[nz = 1]
[zc = h/nz]
[cl = 10.0*zc]
[nx = int((0.5*(l+cl))/zc)]
[b_pfc = (int(0.5*l/(2.0*rad))+1)*2.0*rad-rad]
[b_f3d = b_pfc -cl]
[l = b_f3d + nx*zc]
[epsilon = 1.0e-3]
zone create brick size [nx*nz] [nz] [nz] ...
point 0 [b_f3d] [-0.5*zc] [-0.5*zc] ...
point 1 [l] [-0.5*zc] [-0.5*zc] ...
point 2 [b_f3d] [ 0.5*zc] [-0.5*zc] ...
point 3 [b_f3d] [-0.5*zc] [ 0.5*zc]
zone cmodel assign elastic
zone property young [emod] poisson [nu]
zone initialize density [rho]
model cycle 0 ; to initialize gp masses
model range create 'right' position-x [l-0.1*zc] [l+0.1*zc]
zone face group 'right' range named-range 'right'
zone face apply quiet-normal range named-range 'right'
zone face apply quiet-dip range named-range 'right'
zone face apply quiet-strike range named-range 'right'
zone gridpoint fix velocity-y
zone gridpoint fix velocity-z
model domain extent [0.0-5.0*rad] [l+5.0*rad] ...
[-nb*rad-5.0*rad] [nb*rad+5.0*rad]
ball generate cubic radius [rad] box [0.0] [b_pfc] [-(nb-1)*rad] [(nb-1)*rad]
ball attribute density [rhob]
contact cmat default model linearpbond ...
method pb_deformability emod [4.0/math.pi*mmod] ...
kratio 1.0 ...
property pb_ten 1e20 pb_coh 1e20
model clean
contact method bond gap 0.01
ball-zone create
fish define setMassFactors(eps)
loop foreach local cb ball.zone.ball.list
local b = ball.zone.ball.ball(cb)
local bxpos = ball.pos.x(b)
ball.extra(b,1) = (1.0-2.0*eps)*(b_pfc - bxpos)/(b_pfc-b_f3d) + eps
ball.zone.ball.mass.factor(cb) = ball.extra(b,1)
endloop
loop foreach local cgp ball.zone.gp.list
local gp = ball.zone.gp.gp(cgp)
local gpxpos = gp.pos.x(gp)
gp.extra(gp,1) = (1.0-2.0*eps)*(b_f3d - gpxpos)/(b_f3d - b_pfc) + eps
ball.zone.gp.mass.factor(cgp) = gp.extra(gp,1)
endloop
end
[setMassFactors(epsilon)]
ball group 'left' range position-x [-0.1*rad] [0.1*rad]
[mleft = ball.groupmap('left')]
history interval 1
model history name '1' mechanical time-total
ball history name '11' velocity-x position 0.0,0.0,0.0
ball history name '12' velocity-x position [0.25*l],0.0,0.0
ball history name '13' velocity-x position [0.5*l],0.0,0.0
zone history name '14' velocity-x position [0.75*l],0,0
zone history name '15' velocity-x position [l],0,0
zone history name '16' velocity-x position [0.5*l],0,0
ball history name '21' displacement-x position 0.0,0.0,0.0
ball history name '22' displacement-x position [0.25*l],0.0,0.0
ball history name '23' displacement-x position [0.5*l],0.0,0.0
zone history name '24' displacement-x position [0.75*l],0,0
zone history name '25' displacement-x position [l],0,0
zone history name '26' displacement-x position [0.5*l],0,0
fish define pulse
local wave = 0.0
if mech.time.total <= 1.0 / wfreq
wave = 0.5*(1.0 - math.cos(2.0*math.pi*wfreq*mech.time.total)) * wpeak
endif
loop foreach local b mleft
ball.force.app(b,1) = 4.0*rad^2*cp*rho*wave
endloop
end
model save 'wave-cpl_ini'
model solve time [3.5*(l/cp)] fish-call 1.0 pulse
model save 'wave-cpl_final'
program return
Endnote
| Was this helpful? ... | Itasca Software © 2024, Itasca | Updated: Nov 12, 2025 |
