Velocity Weakening Joint Model In 3DEC
The Velocity Weakening joint model is similar to a slip-softening model, except that the friction reduces as a function of increasing velocity rather than slip distance.
Formulation
The Velocity Weakening model is based on the standard i Mohr-Coulomb model, but differs in that friction evolves from the static to the dynamic value as shear velocity increases. Also, when shear velocity decreases, the friction will increase again and approach its static value as velocity approaches zero.
There is no softening for the tensile forces. The tensile strength drops instantaneously when the strength is exceeded (no softening) and the tensile strength remains at the residual value (no healing).
Similarly, cohesion follows the usual Mohr-Coulomb peak and residual behavior with cohesion attaining its residual value instantaneously when the shear strength is exceeded and slipping starts.
The friction coefficient is calculated by:
where \(\mu_d\) is the dynamic friction coefficient, \(\mu_s\) is the static friction coefficient, \(v\) is the slip velocity, \(v*\) is a reference velocity and \(a\) is a user-defined exponent.
An example is shown in Figure 1.
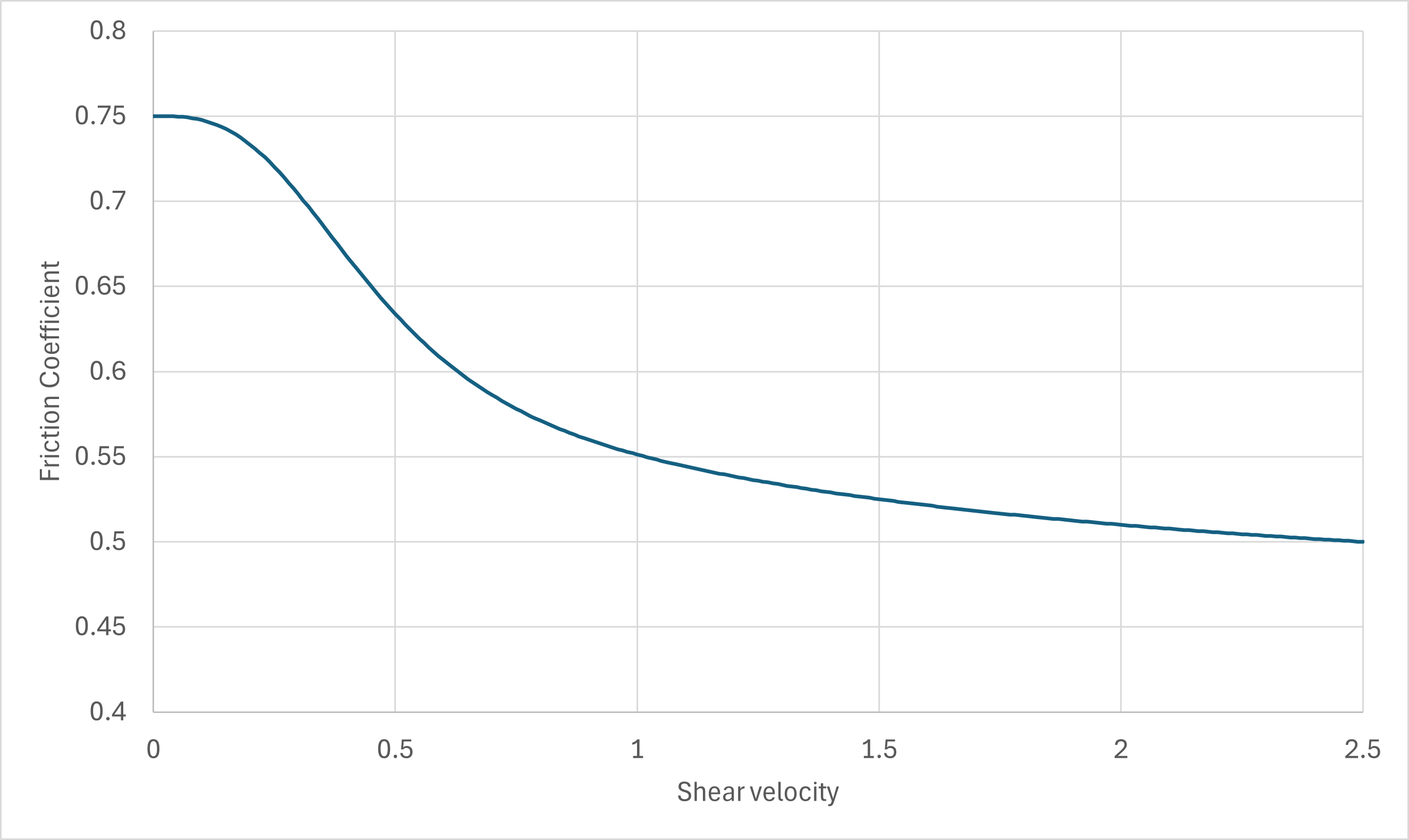
Figure 1: Velocity weakening behavior for \(\mu_s\) = 0.75, \(\mu_d\) = 0.45, \(v*\) = 0.5, and \(a\) = 2.
Subcontact failure states are the same as for i Mohr-Coulomb Joint Model In 3DEC.
Summary of Velocity-Weakening Parameters
The model parameters associated with the softening-healing Mohr-Coulomb model are summarized in Table 1. The model is accessed in 3DEC with the block contact jmodel assign velocity-weakening command.
Parameter |
Description |
Keyword |
|---|---|---|
\(k_n\) |
joint normal stiffness (STRESS/LENGTH) |
|
\(k_s\) |
joint shear stiffness (STRESS/LENGTH) |
|
\(\mu_s\) |
static friction coefficient () |
|
\(\mu_d\) |
dynamic friction coefficient () |
|
\(c\) |
cohesion (STRESS) |
|
\(c_{res}\) |
residual cohesion (STRESS). Defaults to 0. |
|
\(\psi\) |
dilation angle (DEGREES) |
|
\(u_{cs}\) |
shear displacement at which dilation stops (LENGTH). Default is infinity. |
|
\(T_f\) |
tensile strength (STRESS) |
|
\(T_f^{res}\) |
residual tensile strength (STRESS). Default is 0. |
|
\(v*\) |
reference slip velocity (LENGTH/TIME) |
|
\(a\) |
exponent that dictates the severity of friction drop |
|
\(vplas\) |
boolean that indicates whether total shear velocity should be used or only plastic velocity |
|
\(\mu_{current}\) |
current friction coefficient (). Read only. |
|
\(V_s\) |
slip velocity (may be total or plastic only depending on value of \(vplas\)) (LENGTH/TIME). Read only. |
|
\(u_s\) |
slip displacement (plastic only) (LENGTH). Read only. |
|
Example
Note
The project file for this example may be viewed/run in 3DEC.[1] The main data file used is shown below.
A spring-slider problem is simulated with three blocks as shown in Figure 2. A normal stress of 1 MPa is applied to the top surface of the slider block. A velocity of 1 cm/s is applied to the right side of the system. The model is then run until one or more slip events occurs.
The following strength properties are assigned to the sliding joint.
Static friction |
\(\mu_s\) |
0.78 |
Dynamic friction |
\(\mu_d\) |
0.48 |
Reference velocity |
\(v*\) |
0.01 |
a exponent |
\(a\) |
2 |
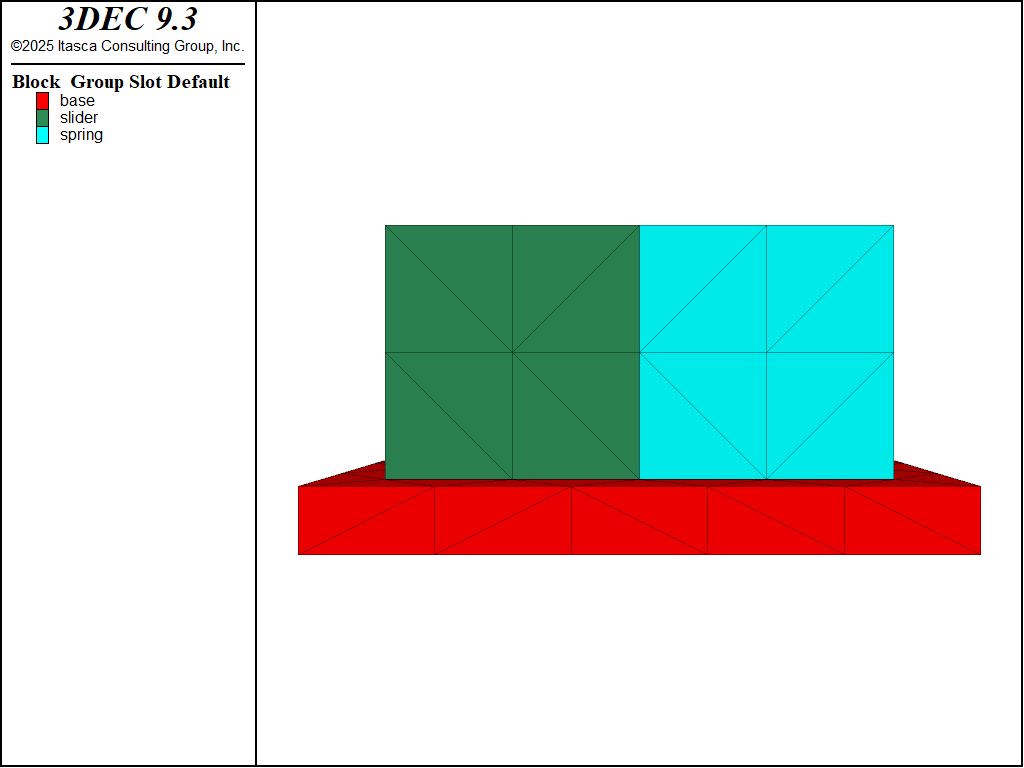
Figure 2: 3DEC Block configuration in the spring-slider test.
Plots of friction on the joint and shear velocity are shown in Figure 3 to Figure 5. It is clear that the friction coefficient decreases as a function of velocity. It is also clear that the friction coefficient recovers as the slip velocity decreases.
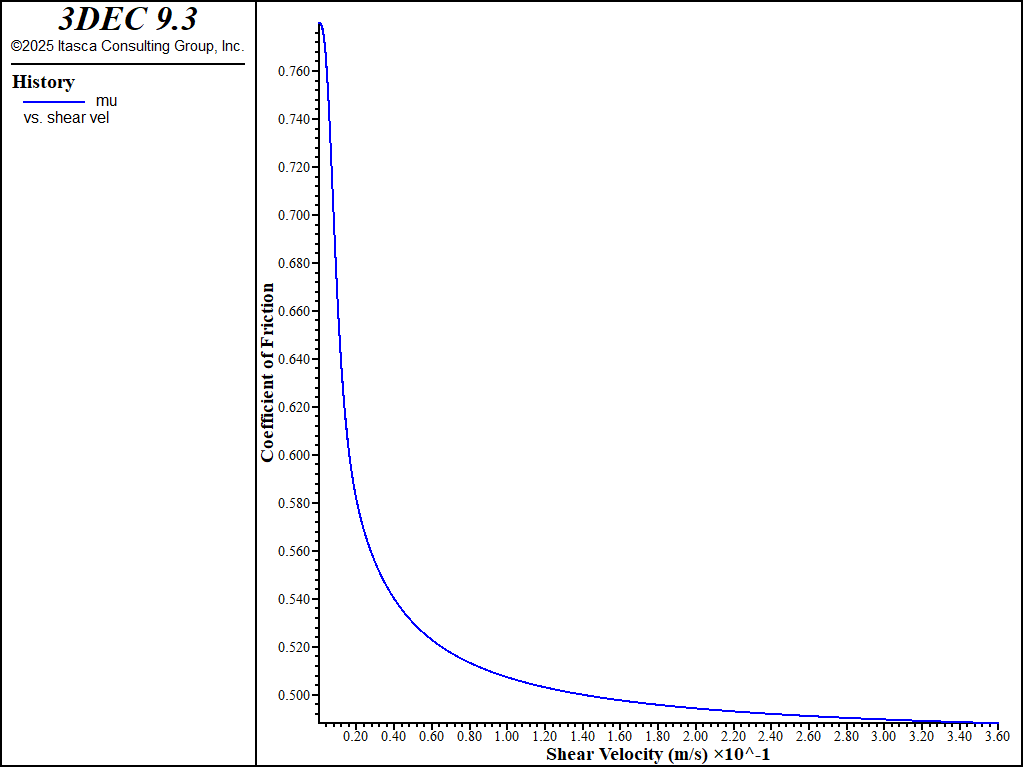
Figure 3: Friction coefficient versus shear velocity in the Velocity Weakening joint model.
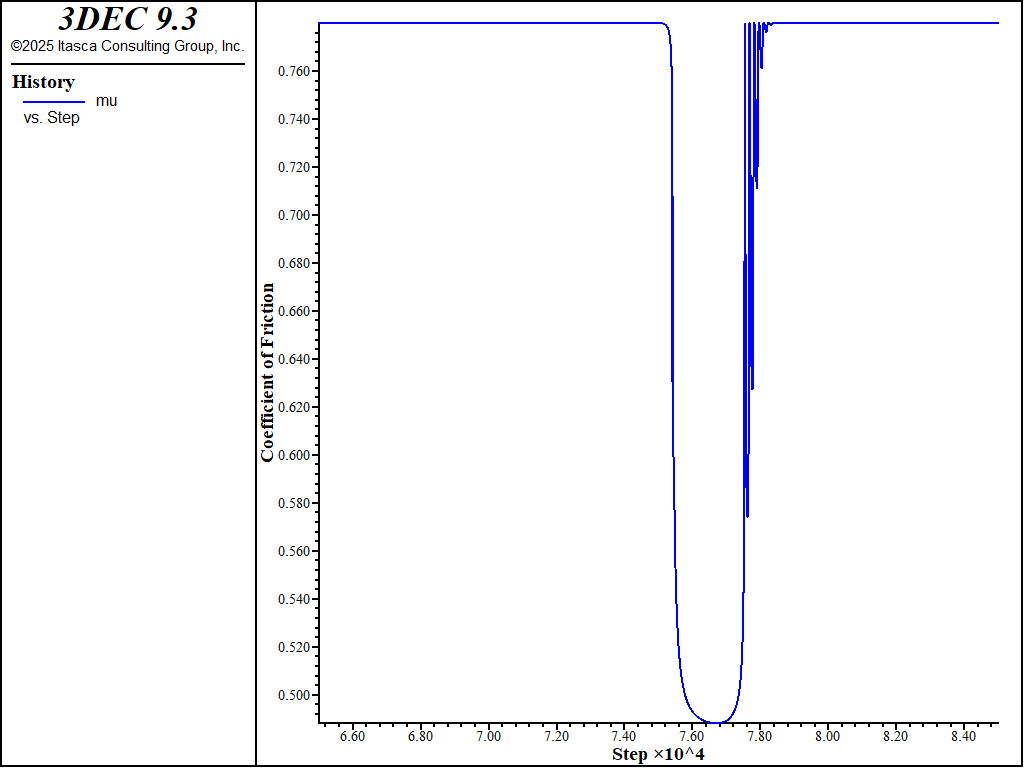
Figure 4: Friction coefficient versus timestep in the Velocity Weakening joint model.
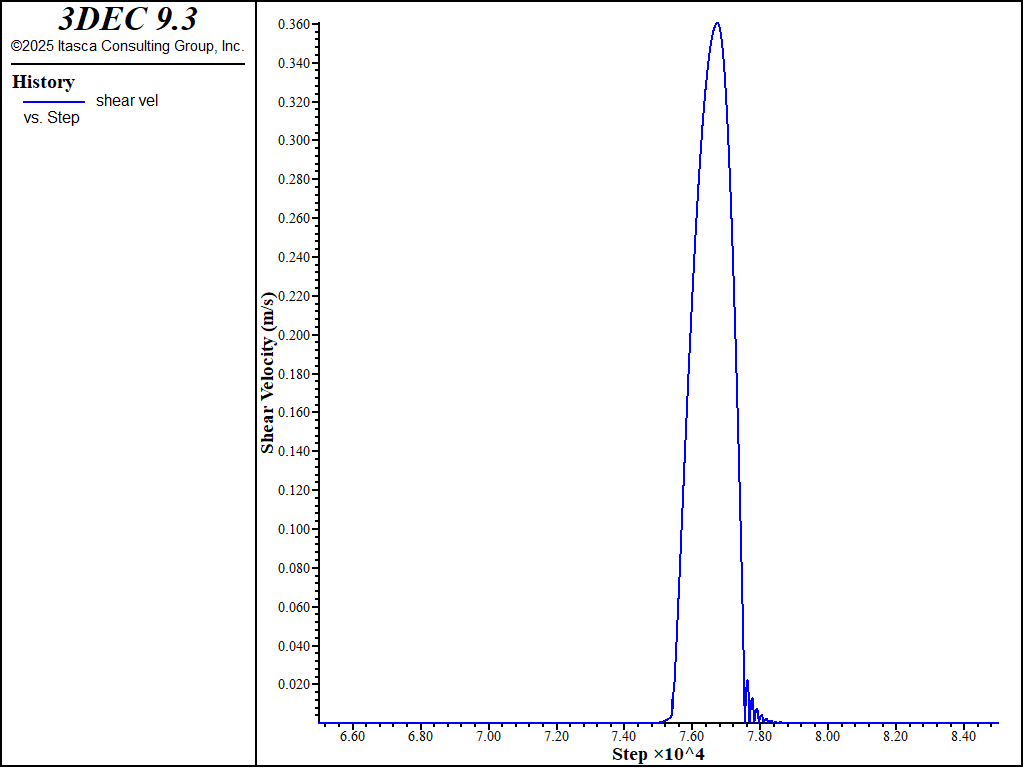
Figure 5: Shear velocity versus timestep in the Velocity Weakening joint model.
Data Files
spring-slider.dat
model new
model random 10000
;
; slider brick
block create brick -0.1 0.1 -0.1 0.1 -0.1 0.1 group 'slider'
;
; spring brick
block create brick 0.1 0.3 -0.1 0.1 -0.1 0.1 group 'spring'
;
; base brick
block create brick -0.15 0.35 -0.15 0.15 -0.15 -0.1 group 'base'
;
; create central subcontact
block zone generate edgelength 0.1 fix 0 0 -0.1
block zone cmodel assign elastic
block zone property density 2e3 bulk 50e9 shear 30e9
;slider-base contact - mohr-coulomb with 0 friction
block contact jmodel assign mohr
block contact property stiffness-normal 1e11 stiffness-shear 1e11
;
; spring
block hide range group 'base'
block contact jmodel assign elastic
block contact property stiffness-normal 1e8 stiffness-shear 1e8
block hide off
;
; sliding contacts
block hide range group 'spring'
; only for single point
block contact jmodel assign velocity-weakening ...
range position-x -0.01 0.02 position-y -0.01 0.01
;
; joint properties
block contact property stiffness-normal 1e11 stiffness-shear 1e11 ...
range position-x -0.01 0.02 position-y -0.01 0.01
block contact property reference-velocity 0.01 friction-static 0.78 ...
friction-dynamic 0.48 exponent 2 ...
range position-x -0.01 0.02 position-y -0.01 0.01
;
block hide off
;
block insitu stress 0 0 -1e6 0 0 0
;
block gridpoint apply velocity-z 0 range position-z -1 1
;
block fix range position-z -0.15 -0.1
model large-strain off
;
model solve ratio 1e-7
;
===========================================================
;
block gridpoint initialize displacement 0 0 0
block contact reset displacement
block gridpoint initialize velocity 0 0 0
;
; ==== FISH for histories =====
[cxi0 = block.subcontact.near(0,0,-0.1)]
fish define rs_mu
rs_mu = block.subcontact.prop(cxi0,'friction-current')
end
fish history name 'mu' rs_mu
block contact history name 'normal stress' stress-normal position 0 0 -0.1
block contact history name 'shear stress' stress-shear position 0 0 -0.1
block contact history name 'shear disp' displacement-shear position 0 0 -0.1
block contact history name 'shear vel' velocity-shear position 0 0 -0.1
; pull spring
block gridpoint apply velocity-x 1e-2 range position-x 0.29 0.31
model cycle 65000
model save 'elastic-vel-1'
; clear histories and start over again taking a reading every step
history purge
history interval 1
model cycle 20000
model save 'elastic-vel-2'
Properties
- cohesion f
Joint cohesion.
- cohesion-residual f
Residual joint cohesion.
- dilation f
Joint dilation angle in degrees.
- dilation-zero f
Shear displacement at which joint will cease to dilate.
- friction-dynamic f
Residual (dynamic) friction coefficient.
- friction-current f
Current friction angle in degrees (read only).
- friction-static f
Peak (static) friction coefficient.
- slip-plastic
Plastic shear displacement magnitude.
- slip-velocity
Shear velocity magnitude. \(v\) in Equation (1).
- stiffness-normal f
Joint normal stiffness (stress / distance).
- stiffness-shear f
Joint shear stiffness (stress / distance).
- tension f
Tensile strength.
- tension-residual f
Residual joint tensile tensile.
Endnote
| Was this helpful? ... | Itasca Software © 2024, Itasca | Updated: Apr 04, 2025 |
