
Infinite Line Heat Source in an Infinite Medium
Note
To view this project in FLAC3D, use the menu command . Choose “Thermal/InfinityLineSource” and select “InfinityLineSource.f3dprj” to load. The project’s main data files are shown at the end of this example.
An infinite line heat source with a constant heat-generating rate is located in an infinite elastic medium with constant thermal properties. Nowacki (1962) provides the solution to this problem for the transient values of temperature, radial and tangential stress, and radial displacement:
| where: | \(\xi\) | = \({r^2}\over{4 \kappa t}\); |
| \(r\) | = radial distance to the line source; | |
| \(\kappa\) | = \({k \over {\rho C_p}}\); | |
| \(a\) | = \({q \over {k}}\); | |
| \(b\) | = \(\alpha_t \ a {9 K \over {3K + 4G}}\); | |
| \(L\) | = unit length; | |
| \(q\) | = energy uniform per unit length; and | |
| \(E_1(\xi)\) | = \(\int_{\xi}^\infty {e^{-u} \over {u}} du\) is the exponential integral. |
The material properties and initial and boundary conditions for this example are defined as follows:
| Material Properties | |
| density (\(\rho\)) | 2000 kg/m3 |
| specific heat (\(C_p\)) | 1000 J/kg °C |
| thermal conductivity (\(k\)) | 4 W/m °C |
| linear thermal expansion coefficient (\(\alpha_t\)) | 5 × 10-6/ °C |
| shear modulus (\(G\)) | 30 GPa |
| bulk modulus (\(K\)) | 50 GPa |
| Initial/Boundary Conditions | |
| initial uniform temperature | 0°C |
| initial stress state | no stresses |
| Line Heat Source | |
| energy release per unit length (\(q\)) | 1600 W/m |
It is assumed that the material properties are temperature-independent, the thermal output of the source is constant (no decay), and the line heat source is of infinite length.
The FLAC3D grid for this problem is a quarter-section of a cylindrical disk. The axis of the line heat source coincides with the y-axis of the model. The grid is radially graded in the xz-plane; a single layer of zones is used in the y-direction. The model is shown in Figure 1.
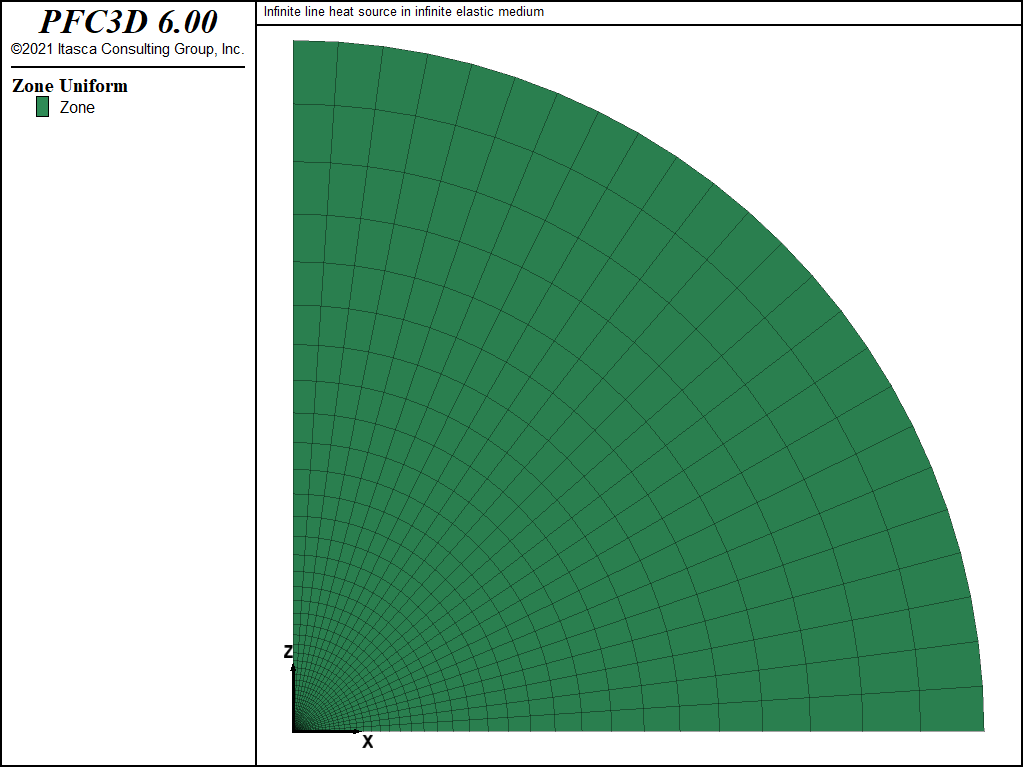
Figure 1: FLAC3D grid for an infinite line heat source.
The line heat source is represented in FLAC3D by two point sources. The intensity of the point source \(q_p\) is adjusted to produce an energy release equivalent to that of a line source of linear intensity \(q\) into the model. For a quarter-symmetry model and two point sources on model thickness, \(t\), the relation between \(q_p\) and \(q\) is
The constant point heat source is applied at gridpoints along the y-axis; the boundaries of the model are kept adiabatic to represent thermal symmetry planes. The grid is extended to a distance of 500 m from the y-axis; this distance is chosen to be large enough to prevent boundary effects from affecting the solution up to the simulation target age of 1 year. The far boundary is mechanically fixed; the boundaries along the x-axis and z-axis are fixed to represent shear-free symmetry planes.
An uncoupled analysis is recommended because the material is elastic. The problem is first thermally
solved to an age of one year (model mechanical active off and model thermal active
on) using the implicit-solution algorithm, and then stepped to mechanical equilibrium
(model mechanical active on and model thermal active off).
For the mechanical phase, we use combined damping (zone mechanical damping combined).
The heat source produces uniform motion in one direction for this problem. Combined damping is
better suited to this case than local damping (see Mechanical Damping).
The dimensionless form of the analytical solutions in Equation (1) are programmed via FISH functions. The analytical and numerical values can then be compared directly in tables. The analytical solutions for temperature and radial displacement are programmed in the FISH function ana�_soltu, and for radial and tangential stresses in ana�_solst. The exponential integral function used in the analytical solutions is programmed as a separate FISH function called exp-int. The dimensionless values for the numerical results for temperature and displacement are calculated in the FISH function num�_soltu, and for radial and tangential stresses in num�_solst. The numerical values for dimensionless temperature, radial stress, tangential stress, and radial displacement are stored in Tables 1, 3, 5, and 7, respectively. The analytical values for dimensionless temperature, radial stress, tangential stress, and radial displacement are stored in Tables 2, 4, 6, and 8, respectively.
The results for temperature, radial displacement, and radial and tangential stress distributions at 1 year are presented in the table plots in Figure 2 to Figure 4. The difference between numerical and analytical solutions for temperature is less than 2%. The comparison is also good for displacements and for stresses; the difference is generally less than 2% within 100 m of the heat source. The fixed outer boundary has an influence on the numerical results farther from the source, but the agreement is still reasonable.
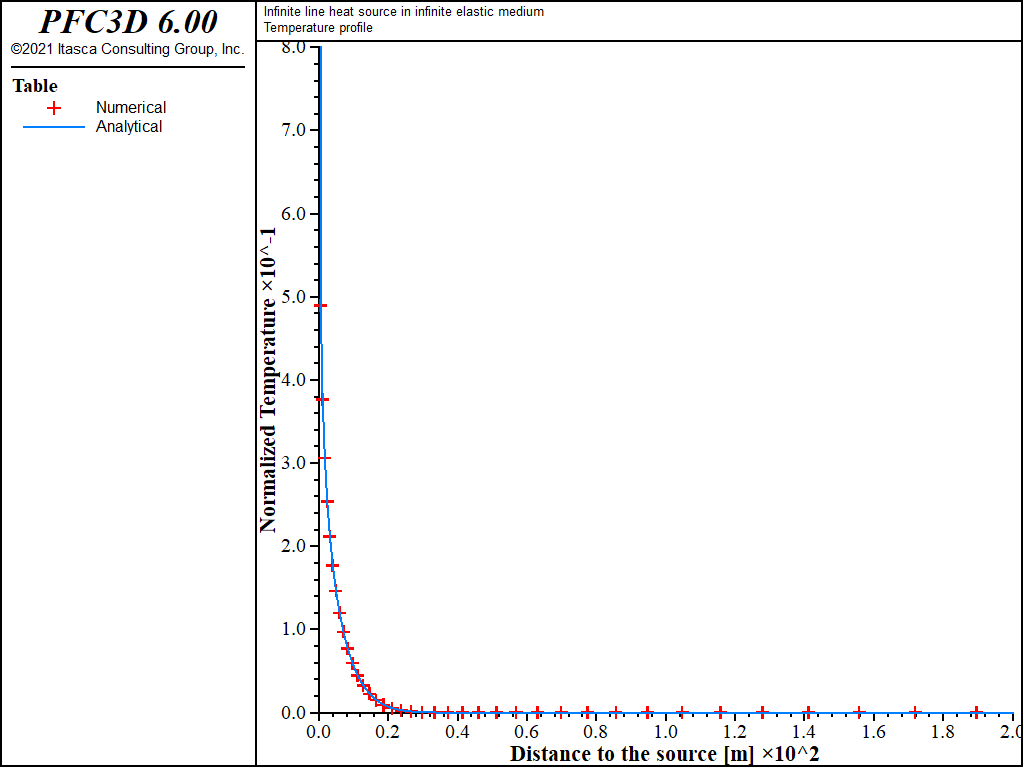
Figure 2: Temperature distribution at 1 year.
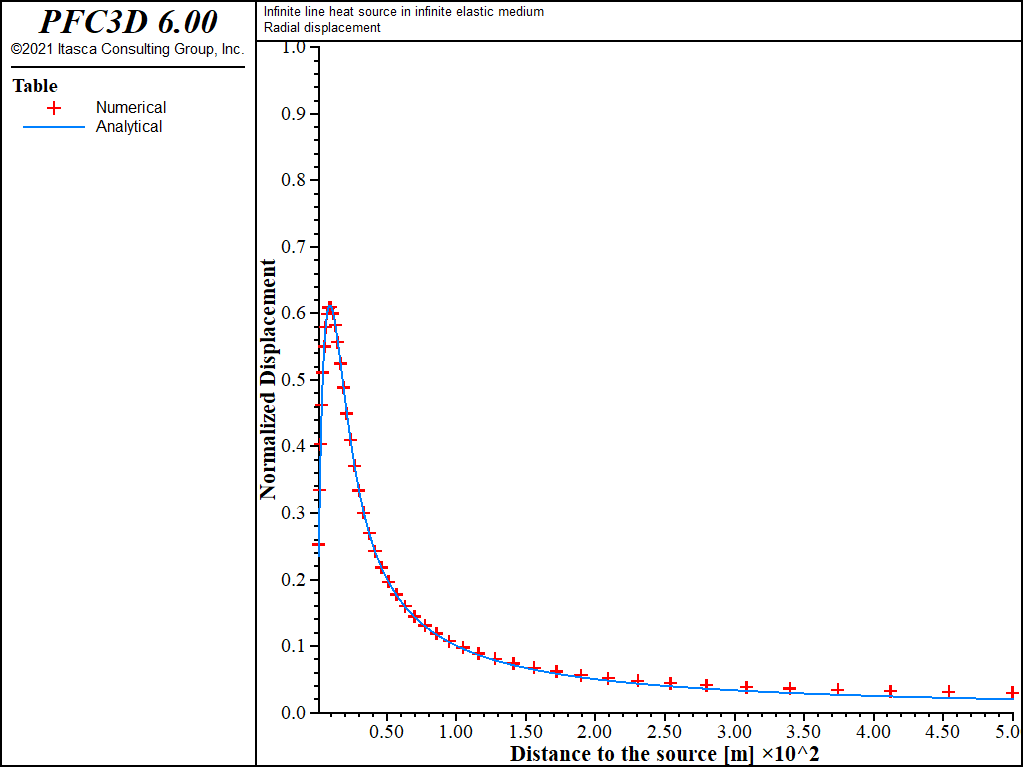
Figure 3: Radial displacement distribution at 1 year.
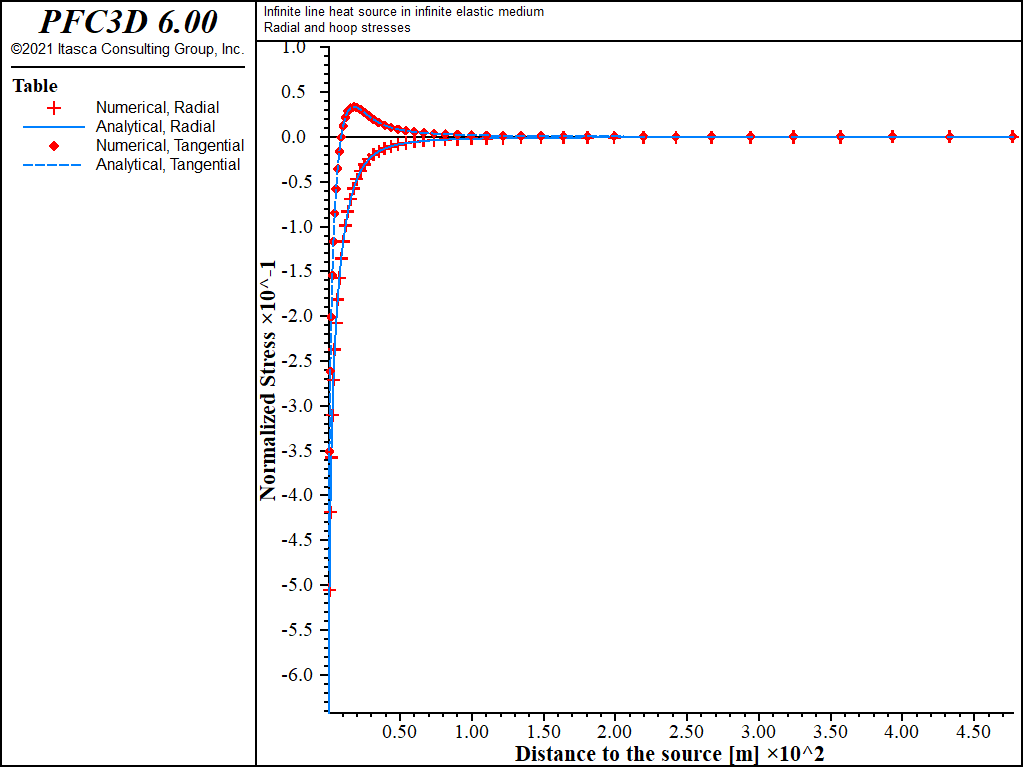
Figure 4: Radial and tangential stress distributions at 1 year.
Reference
Nowacki, W. Thermoelasticity. New York: Addison-Wesley (1962).
Data File
; Heating of a hollow cylinder
; coupled and uncoupled thermal/mechanical calculations
model new
model largestrain off
fish automatic-create off
model title 'Heating of a hollow cylinder - thermal ... mechanical calculations'
model configure thermal
call 'fishFunctions'
@cons ;fish cosntants
; --- main computation ---
zone create cylindrical-shell point 1 (@c_b,0,0) point 2 (0,0.1,0) point 3 (0,0,@c_b) dimension (1,1,1,1) size 10 1 12
zone face skin
; --- mechanical model
zone cmodel assign elastic
zone property bulk @c_k sh @c_g
zone face apply velocity-z 0 range group 'Bottom'
zone face apply velocity-x 0 range group 'West1'
zone face apply velocity-y 0 range group 'North' or 'South'
; --- thermal model
zone thermal cmodel isotropic
zone thermal property conductivity 4.2 expansion @c_al specific-heat @c_sp
zone initialize density 2000
zone face apply temperature 100 range group 'West2'
zone face apply temperature 0 range group 'East'
model save 'cyl-init'
; uncoupled analysis
model mechanical active off
model thermal active on
model solve
model mechanical active on
model thermal active off
model solve
model thermal active on
@num_solt
@ana_solt
@num_solst
@ana_solst
model save 'cyl-ucpl'
; coupled analysis
model restore 'cyl-init'
model mechanical active on
model thermal active on
model mechanical substep 10000
model mechanical slave on
model solve ratio 1e-3
@num_solt
@ana_solt
@num_solst
@ana_solst
model save 'cyl-cpl'
return
| Was this helpful? ... | PFC 6.0 © 2019, Itasca | Updated: Nov 19, 2021 |