Slip on a Fault
Introduction
Note
The project file for this example may be viewed/run in PFC.[1] The data files used are shown at the end of this example.
This tutorial demonstrates how to simulate sliding on a single fault or joint. A fault can exhibit stable (locked) or unstable (sliding) behavior depending on the magnitude of shear and normal stress acting on the fault and the fault friction angle. To test this in PFC, a bonded particle model is created using the linear parallel bond model and a joint is added by applying the smooth joint model to selected contacts. The model is subjected to gravitational loading and the sliding behavior of the joint is examined for different joint friction angles.
PFC2D model
Bonded Assembly
A 6×6 m sample is constructed by following the same procedure as in the tutorial “Generating a Bonded Assembly”. The commands, not detailed herein, are in the data file “make_intact.dat (2D)”.
The intact material model is shown in Figure 1. The figure is created by plotting balls and coloring by (currently all 0). Contacts are also plotted and colored by the (currently all linear parallel bonds).
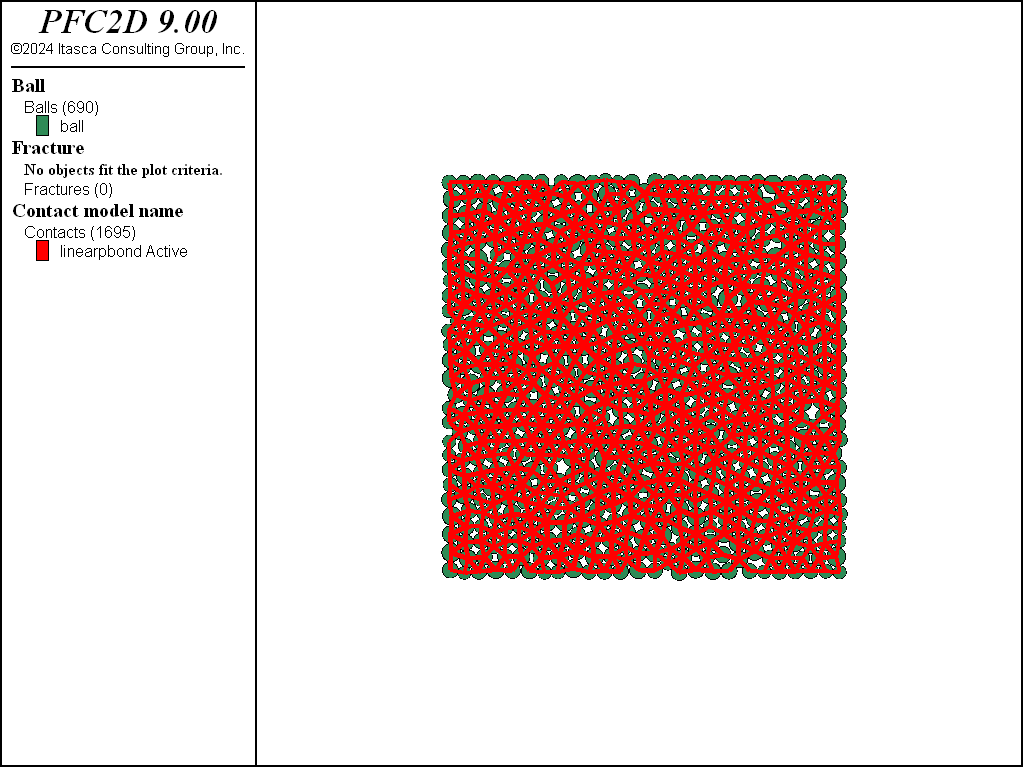
Figure 1: Intact material model.
Adding a Fault
The commands for adding a fault to the model are provided in “make_fault.dat (2D)”. First the intact model is restored. The easiest way to add faults is to first create a Discrete Fracture Network (DFN). In this example, a DFN is created that contains only a single fracture. The fracture has a dip of 30 degrees and a diameter of 20 m to ensure that it spans the entire model. This can be accomplished with a single command:
By default, the shape of the fracture is a line (disk in 3D), and the coordinates of the center default to 0.0. You can add the DFN to your plot to view it as shown in Figure 2. In this figure, the DFN color was changed to black for ease of viewing. This can be found under the DFN plot Attribute, “Color Opt – Colors – facets”.
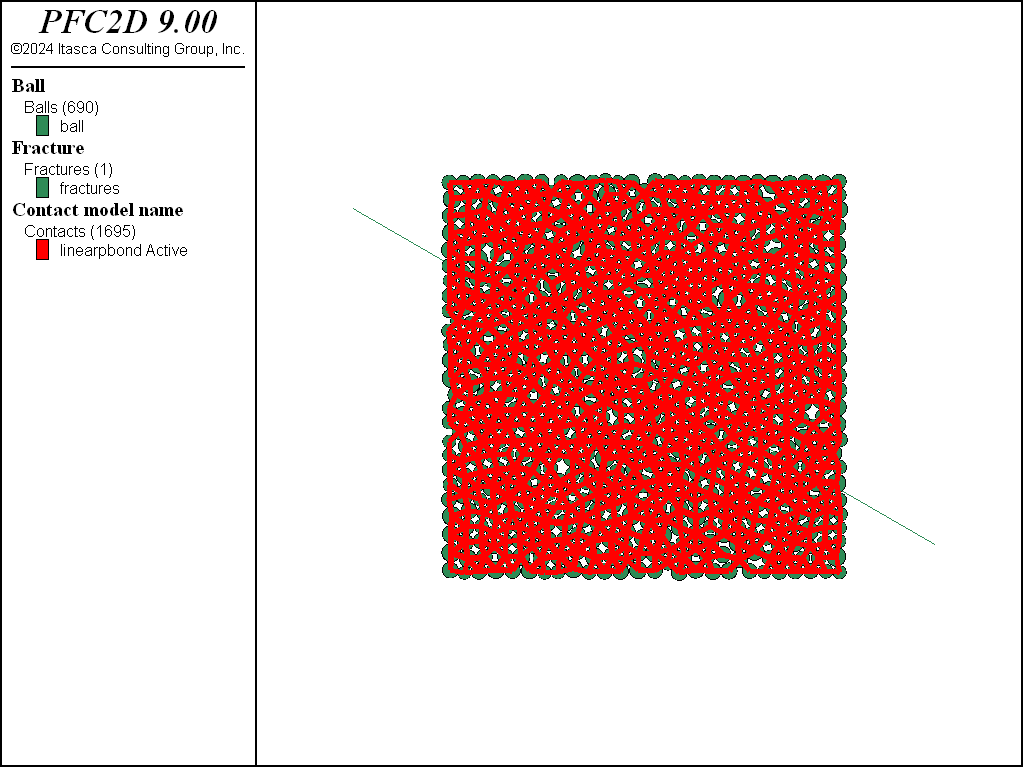
Figure 2: Model with DFN.
The properties of the smooth joint contacts can be set by first assigning properties to the DFN. Whatever properties are assigned to the DFN will automatically be assigned to contacts created with the fracture contact-model model command (see below). The properties for the fault are shown in the following command:
The friction angle is set to 35°. Since this is more than the dip of the fault, it is expected that there will be no sliding on the fault. Note that, as input, PFC requires the dimensionless friction coefficient \(\mu\) (tangent of the friction angle) rather than the friction angle in degrees. Setting the sj_large parameter to 1 ensures that the joint contacts behave properly when large strain is expected. Essentially, if two smooth joint contacts move far enough apart, then the contact is removed. Setting sj_large=1 adds a small amount of computational overhead since contacts need to be checked to see if they have moved apart. The smooth joint contact model is then assigned to all contacts that intersect the DFN (in this case, a single fracture). A contact intersects the fracture if one particle centroid is on one side of the fracture and the other particle centroid is on the opposite side. It is possible to specify a wider fault zone using the ‘distance’ keyword. Setting a non-zero value for the distance will pick up extra contacts within the specified distance of the fault. For this example, we specify a distance of 0.1. The command to create smooth contacts along the joint is as shown:
Your plot should now show the smooth joint contacts and parallel bonded contacts in different colors (Figure 3).
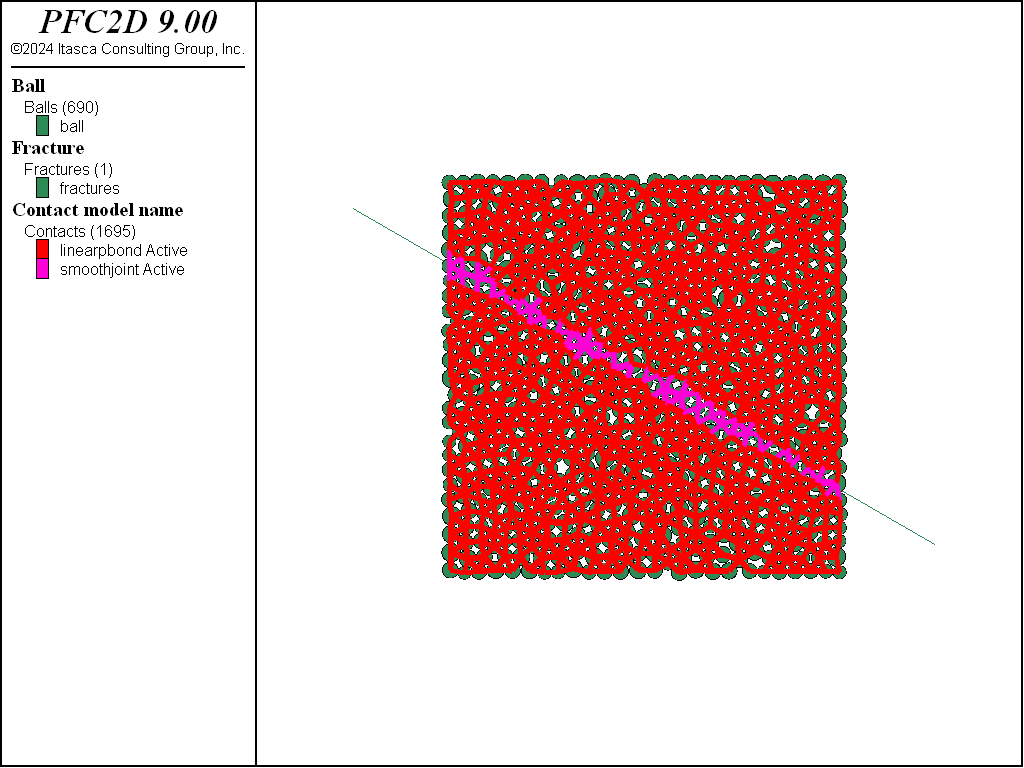
Figure 3: Faulted material.
Smooth joint contacts will usually have an orientation different from the default orientation dictated by the two connecting particles. In general, the orientation of the smooth joint contact is set to be parallel to some fault plane so that slip along this plane may occur without the ‘bumpiness’ that would result if contacts were not reoriented (see link for more information). The orientation of the smooth joint contacts is automatically set to be the same as the orientation of fractures in a DFN. Under the contact plot item attributes, check the box for . This will render the smooth joint contacts with their ‘true’ orientations (Figure 4). Note that in 2D, contacts are shown as lines parallel to the normal force direction (perpendicular to the fault). In 3D, the contacts can be rendered as disks parallel to the shear direction (parallel to the fault), as shown in Figure 7.
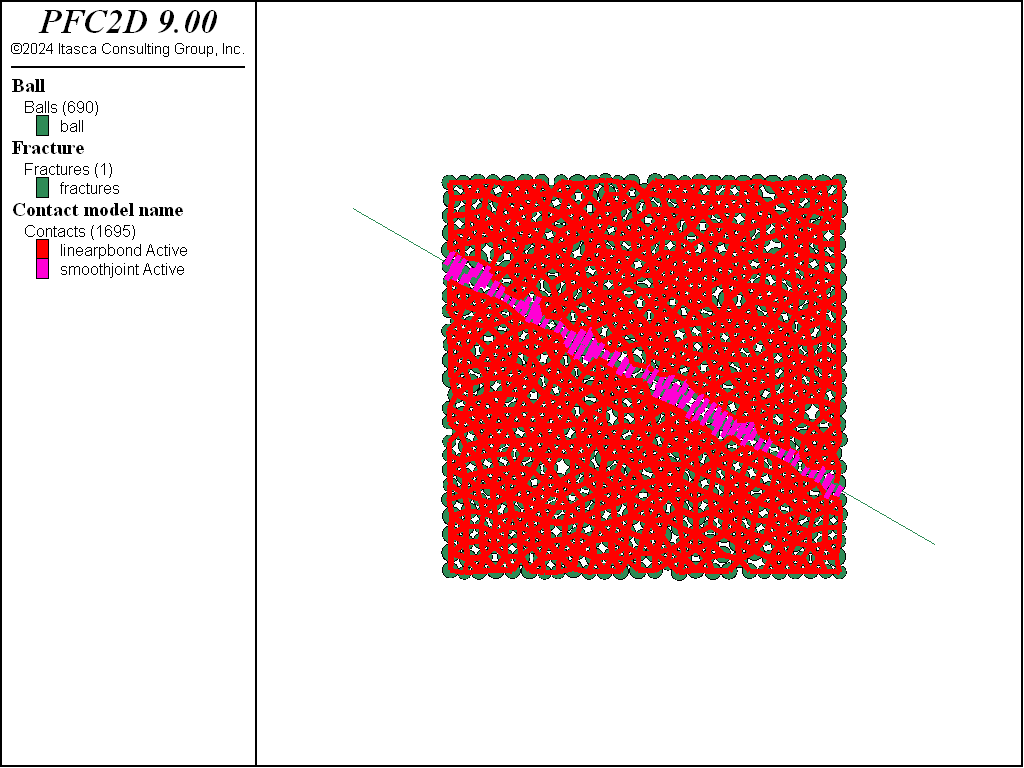
Figure 4: Contacts, balls, and DFN for the model with a fault added.
Finally, we want new contacts that form as the joint is sliding to be assigned the smooth joint contact model as well. This is accomplished by activating the DFN contact model assignment:
Gravitational Loading
The full data file for this stage is “load.dat (2D)”. Gravitational loading is applied by first fixing a row of particles at the bottom of the model. Gravity is then turned on and an acceleration of 10 m/s2 is assigned. The default direction for acceleration due to gravity in 2D is in the negative y direction.
If you change the attribute for the balls to , you can see the fixed particles at the bottom (Figure 5).
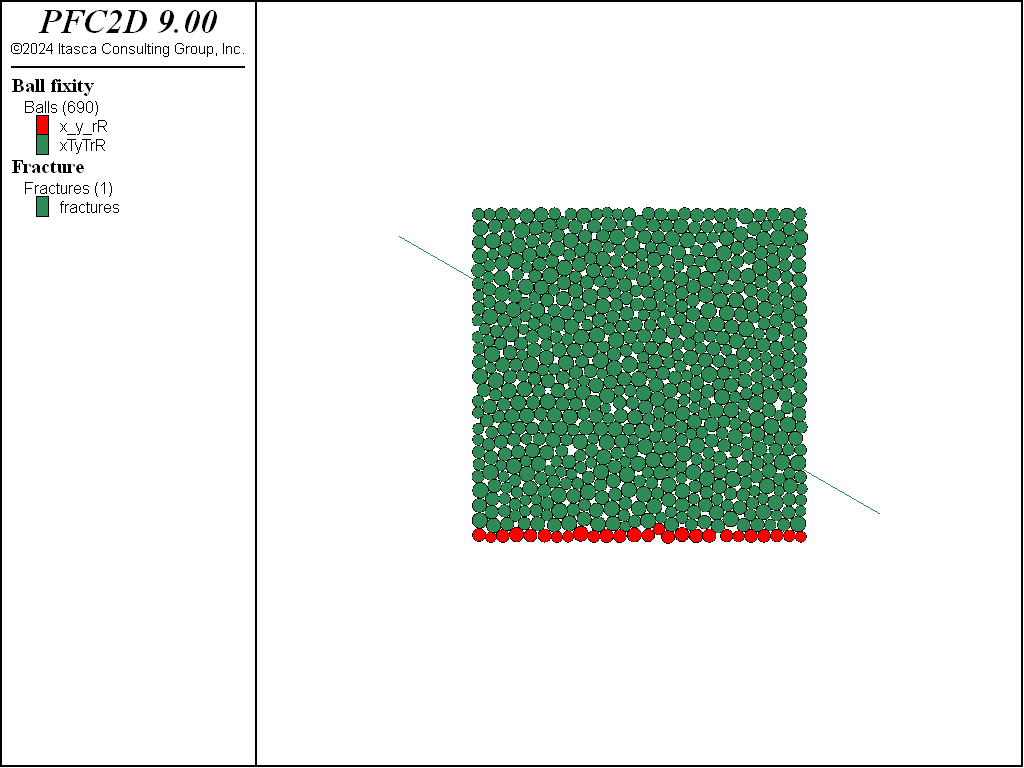
Figure 5: Balls colored by their fixity condition.
Since we expect the model to be stable, we can then just use the solve command to bring it to equilibrium.
The particles displace downward with magnitudes as shown in Figure 6.
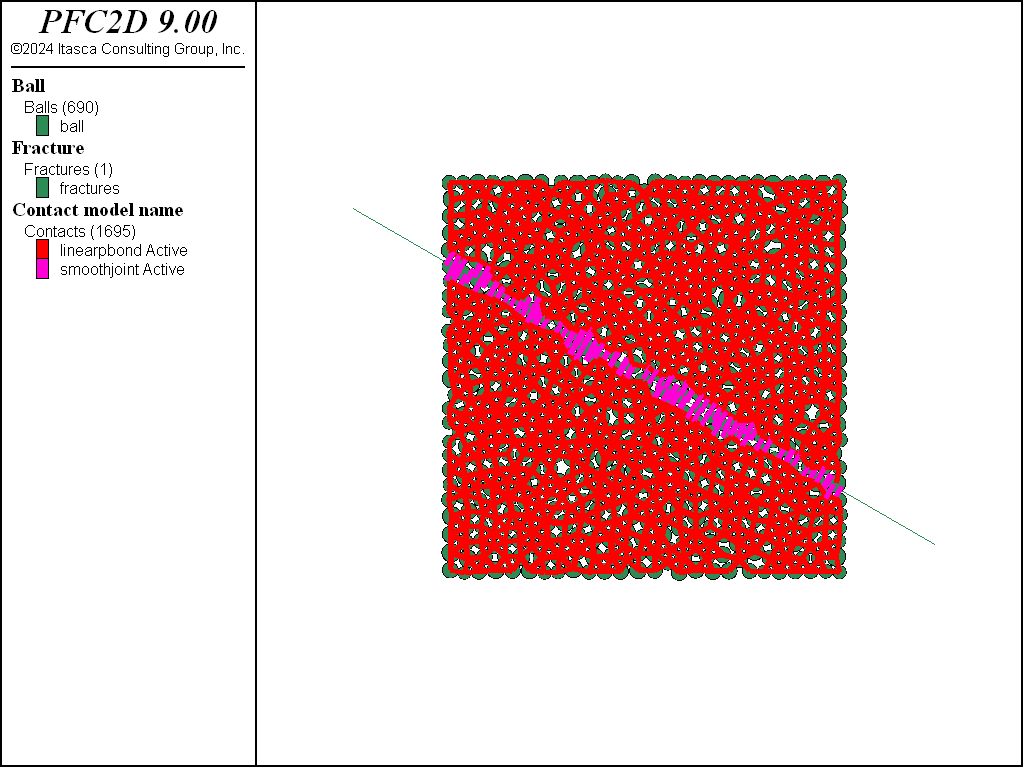
Figure 6: Particle displacements after reaching equilibrium in the model with a fault friction angle of 35°.
Now try setting the fault friction angle to 25° (\(\mu\) = 0.466). The following command will change the friction of all existing and future smooth joint contacts within range of the DFN.
Since we are expecting a lot of motion, it is a good idea to decrease the local damping to get more realistic behavior:
Since we expect the model to slide unstably, we cannot use the solve command. Instead we will execute 20,000 cycles:
The plot of ball displacement now clearly shows the sliding on the fault (Figure 7).
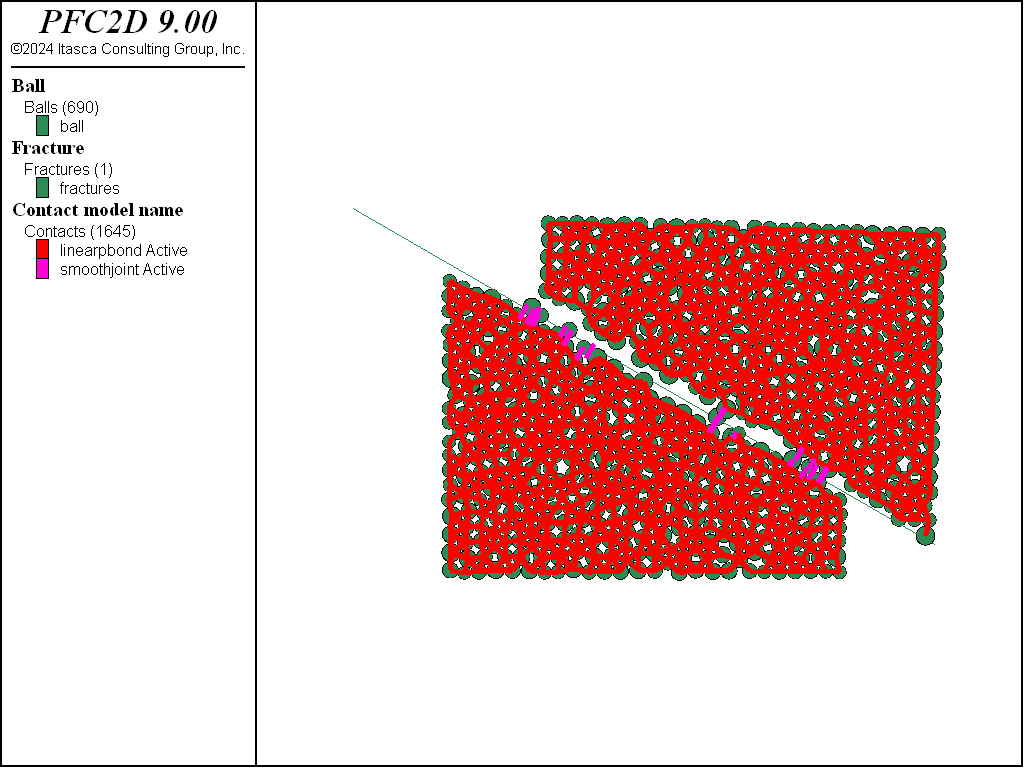
Figure 7: Particle displacements after 20,000 steps in the model with a fault friction angle of 25°.
PFC3D model
The 3D model is essentially the same with a slightly larger ball size. The data files are “make_intact.dat (3D)”, “make_fault.dat (3D)”, and “load.dat (3D)”. The final state for the 3D model is shown in Figure 8.
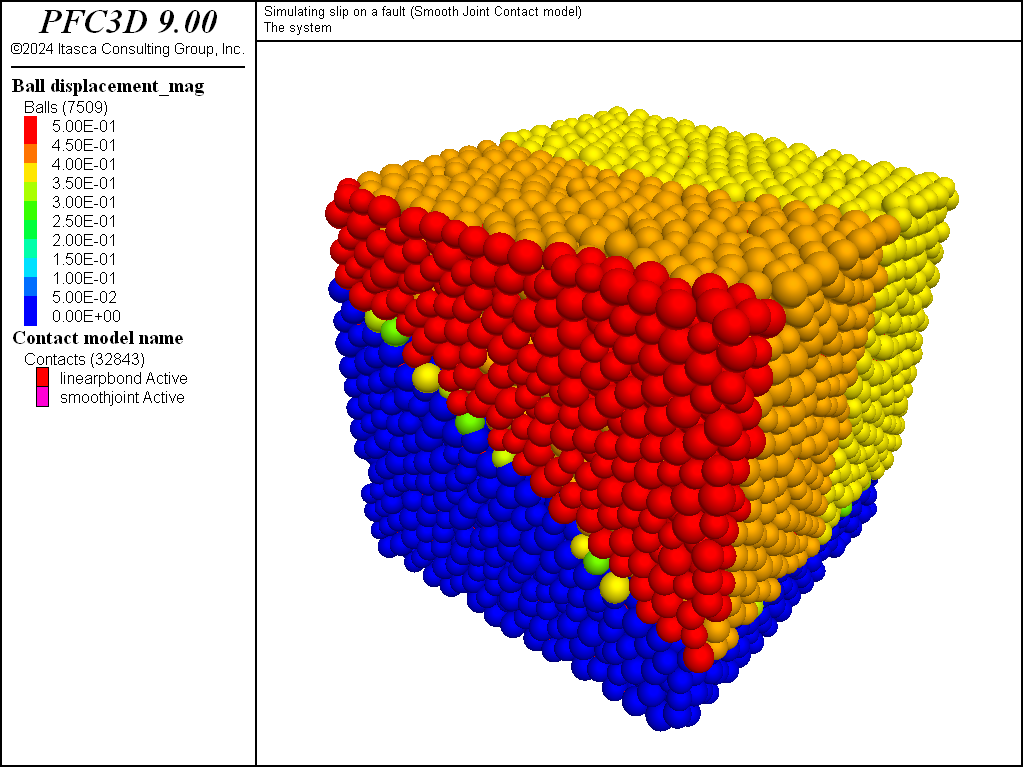
Figure 8: 3D model after slip on fault with friction angle of 25°.
Discussion
This example shows how to simulate sliding on a single fault by assigning the Smooth Joint Contact Model to contacts that intersect a circular fracture. The techniques shown here could also be used to simulate a sample of rock with many intersecting faults; however, in that case, a much higher resolution would be required. By using the fracture contact-model model command, intersecting contacts are automatically identified and assigned the correct orientation and properties. If you wish to simulate multiple fracture sets with different properties, multiple DFNs could be created with different properties assigned to them.
Data Files
make_intact.dat (3D)
; fname: make_intact.dat (3D)
;
; Create parallel bonded sample
;=========================================================================
model new
model large-strain on
model title 'Simulating slip on a fault (Smooth Joint Contact model)'
; Set the domain extent
model domain extent -20 20
; Modify the default slots of the Contact Model Assignment Table
; This sets the normal stiffness only for all contacts
contact cmat default model linearpbond property kn 5e7 dp_nratio 0.5
; Generate walls
wall generate box -6 6
; Distribute balls in the box.
model random 1001
ball distribute porosity 0.2 radius 0.3 0.4 box -6 6
; Set ball attributes
ball attribute density 1000.0 damp 0.7
; Calm the system
model cycle 1000 calm 10
; Solve the system to a target limit (here the average force ratio)
; Use density scaling to quickly reach equilibrium
model mechanical timestep scale
model solve ratio-average 1e-3
model mechanical timestep automatic
model calm
; delete walls
wall delete
; Install parallel bonds to particles in contact
; assign very high strength to prevent breakage
contact method bond gap 0.0
contact property pb_kn 1e8 pb_ks 1e8 pb_ten 1e12 pb_coh 1e12 pb_fa 30.0
; Reset ball displacement
ball attribute displacement multiply 0.0
; Set the linear stiffness to 0.0 and force a reset of
; the linear contact forces.
contact property kn 0.0 lin_force 0.0 0.0 0.0
ball attribute force-contact multiply 0.0 moment-contact multiply 0.0
model cycle 1
model solve ratio-average 1e-5
model save 'intact'
;=========================================================================
; eof: make_intact.dat (3D)
make_fault.dat (3D)
; fname: make_fault.dat (3D)
;
; Restore an intact BPM
; Generate a single fracture and install the smoothjoint contact model
; at contacts intercepted by the fracture
;========================================================================
model restore 'intact'
; Add single joint with dip of 30 degrees
; The default center location is 0,0
fracture create dip 30 dip-direction 90 size 20.0
; Set dfn properties to be assigned to intersecting contacts
; Friction angle is 35 degrees
fracture property 'sj_kn' 2e9 'sj_ks' 2e9 'sj_fric' 0.70 ...
'sj_coh' 0.0 'sj_ten' 0.0 'sj_large' 1
; Apply smoothjoint contact model to contacts intercepted by fracture
fracture contact-model model 'smoothjoint' install distance 0.1
; Ensure that new contacts intersecting the fracture are
; set to the sj contact model
fracture contact-model model 'smoothjoint' activate
model save 'fault'
;=========================================================================
; eof: make_fault.dat (3D)
load.dat (3D)
; fname: load.dat (3D)
;
; Restore the faulted BPM
; Apply gravitational load and test different joint friction angles
;=========================================================================
model restore 'fault'
; Fix row of balls at the bottom
ball fix velocity range position-z -6 -5.3
; Turn on gravity
model gravity 10
model solve ratio-average 1e-5
model save 'load_fric35'
; now set friction angle to 25 degrees
fracture property 'sj_fric' 0.466
; Decrease damping
ball attribute damp 0.1
; Do not use solve command since we expect unstable sliding
model cycle 10000
model save 'load_fric25'
;=========================================================================
; eof: load.dat (3D)
make_intact.dat (2D)
; fname: make_intact.dat (2D)
;
; Create parallel bonded sample
;=========================================================================
model new
model large-strain on
model title 'Simulating slip on a fault (Smooth Joint Contact model)'
; Set the domain extent
model domain extent -20 20
; Modify the default slots of the Contact Model Assignment Table
; This sets the normal stiffness only for all contacts
contact cmat default model linearpbond property kn 5e7 dp_nratio 0.5
; Generate walls
wall generate box -6 6
; Distribute balls in the box.
model random 1001
ball distribute porosity 0.05 radius 0.2 0.3 box -6 6
; Set ball attributes
ball attribute density 1000.0 damp 0.7
; Calm the system
model cycle 1000 calm 10
; Solve the system to a target limit (here the average force ratio)
; Use density scaling to quickly reach equilibrium
model mechanical timestep scale
model solve ratio-average 1e-3
model mechanical timestep automatic
model calm
; delete walls
wall delete
; Install parallel bonds to particles in contact
; assign very high strength to prevent breakage
contact method bond gap 0.0
contact property pb_kn 1e8 pb_ks 1e8 pb_ten 1e12 pb_coh 1e12 pb_fa 30.0
; Reset ball displacement
ball attribute displacement multiply 0.0
; Set the linear stiffness to 0.0 and force a reset of
; the linear contact forces.
contact property kn 0.0 lin_force 0.0 0.0
ball attribute force-contact multiply 0.0 moment-contact multiply 0.0
model cycle 1
model solve ratio-average 1e-5
model save 'intact'
;=========================================================================
; eof: make_intact.dat (2D)
make_fault.dat (2D)
; fname: make_fault.dat (2D)
;
; Restore an intact BPM
; Generate a single fracture and install the smoothjoint contact model
;at contacts intercepted by the fracture
;========================================================================
model restore 'intact'
; Add single joint with dip of 30 degrees
; The default center location is 0,0
fracture create dip 30 size 20.0
; Set dfn properties to be assigned to intersecting contacts
; Friction angle is 35 degrees
fracture property 'sj_kn' 2e9 'sj_ks' 2e9 'sj_fric' 0.70 ...
'sj_coh' 0.0 'sj_ten' 0.0 'sj_large' 1
; Apply smoothjoint contact model to contacts intercepted by fracture
; Ensure that new contacts intersecting the fracture are set to
; the sj contact model
fracture contact-model model 'smoothjoint' install distance 0.1 activate
model save 'fault'
;=========================================================================
; eof: make_fault.dat (2D)
load.dat (2D)
; fname: load.dat (2D)
;
; Restore the faulted BPM
; Apply gravitational load and test different joint friction angles
;=========================================================================
model restore 'fault'
; Fix row of balls at the bottom
ball fix velocity range position-y -6 -5.5
; Turn on gravity
model gravity 10
model solve ratio-average 1e-5
model save 'load_fric35'
; now set friction angle to 25 degrees
fracture property 'sj_fric' 0.466
; Decrease damping
ball attribute damp 0.1
; Do not use solve command since we expect unstable sliding
model cycle 20000
model save 'load_fric25'
;=========================================================================
; eof: load.dat (2D)
Endnote
| Was this helpful? ... | Itasca Software © 2024, Itasca | Updated: Nov 12, 2025 |
