|
|
| ContactModelMechanical () |
| | Constructor.
|
| |
|
| ~ContactModelMechanical () override |
| | Destructor.
|
| |
|
int | getIndex () const override |
| | Overrides so that the class is not abstract.
|
| |
|
void | setIndex (int) override |
| |
|
double | getActivityDistance () const override |
| |
|
void | resetForcesAndMoments () override |
| |
|
void | setForce (const DVect &, IContact *) override |
| |
|
void | setArea (const double &) override |
| |
|
double | getArea () const override |
| |
| bool | isOKToDelete () const override |
| | Generic implementation - by default it is always OK to delete a contact.
|
| |
|
ContactModel * | getContactModel () override |
| | Return the IContactModel pointer.
|
| |
|
const ContactModel * | getContactModel () const override |
| | Return the const IContactModel pointer.
|
| |
|
virtual bool | checkActivity (const double &) |
| | Default implementation - the contact is not active.
|
| |
|
bool | isSliding () const override |
| | Default implementation - the contact model is not sliding.
|
| |
|
bool | isBonded () const override |
| | Default implementation - the contact model is not bonded.
|
| |
|
void | unbond () override |
| | Default implementation - the contact model is not bonded.
|
| |
|
bool | hasNormal () const override |
| | Default implementation - the contact model has no normal.
|
| |
|
DVect3 | getNormal () const override |
| | Default implementation - the contact model normal is the 0 vector.
|
| |
|
void | setPorePressure (const double &) override |
| | Default implementation - throws an exception if contact model doesn't support it.
|
| |
|
void | propagateStateInformation (IContactModelMechanical *, const CAxes &n=CAxes(), const CAxes &l=CAxes()) override |
| | Default implementation - state information is not propagated.
|
| |
| virtual bool | endPropertyUpdated (const string &name, const IContactMechanical *c)=0 |
| |
|
virtual bool | validate (ContactModelMechanicalState *state, const double ×tep)=0 |
| | Returns true if contact is valid. Must be implemented.
|
| |
| virtual bool | forceDisplacementLaw (ContactModelMechanicalState *state, const double ×tep)=0 |
| |
|
virtual bool | thermalCoupling (ContactModelMechanicalState *, ContactModelThermalState *, IContactThermal *, const double &) |
| | Used for explicit mechanical/thermal coupling. Returns true if anything changed.
|
| |
| virtual DVect2 | getTimestepLimits (ContactModelMechanicalState *, const double &) const |
| |
|
virtual DVect2 | getEffectiveTranslationalStiffness () const |
| | Return the effective translational stiffness - used for timestep calculation.
|
| |
|
virtual DAVect | getEffectiveRotationalStiffness () const |
| | Return the effective rotational stiffness - used for timestep calculation.
|
| |
|
void | getSphereList (const IContact *, std::vector< DVect > *, std::vector< double > *, std::vector< double > *) override |
| | Default implementation so that no sphere list must be defined.
|
| |
|
void | getCylinderList (const IContact *, std::vector< DVect > *, std::vector< DVect > *, std::vector< double > *, std::vector< double > *, std::vector< double > *) override |
| | Default implementation so that no cylinder list must be defined.
|
| |
|
virtual DVect | getForce () const |
| | Return the total force that the contact model holds.
|
| |
| virtual DAVect | getMomentOn1 (const IContactMechanical *) const |
| |
| virtual DAVect | getMomentOn2 (const IContactMechanical *) const |
| |
|
virtual DAVect | getModelMomentOn1 () const |
| | Return the moment on 1 that the contact model holds, not including any torque.
|
| |
|
virtual DAVect | getModelMomentOn2 () const |
| | Return the moment on 2 that the contact model holds, not including any torque.
|
| |
| ContactModelMechanical * | clone () const override |
| | Make a clone of this contact model. Must be implemeted.
|
| |
|
| ContactModelMechanical (const ContactModelMechanical &) noexcept |
| | Copy constructor.
|
| |
|
const ContactModelMechanical & | operator= (const ContactModelMechanical &) |
| | Assignment operator.
|
| |
|
virtual void | addToStorage (poly::vector< ContactModelMechanical > *, int=-1) |
| | For polymorphic container access.
|
| |
|
| ContactModel () |
| | Constructor.
|
| |
|
virtual | ~ContactModel () |
| | Destructor.
|
| |
|
virtual void | archive (ArchiveStream &) |
| | Used for save/restore. Important to implement.
|
| |
|
virtual void | copy (const ContactModel *cm) |
| | Copy the contact model from cm. Must be overridden in derived classes.
|
| |
|
IContactModel * | getContactModel () override |
| | Return the IContactModel pointer.
|
| |
|
const IContactModel * | getContactModel () const override |
| | Return the const IContactModel pointer.
|
| |
|
string | getName () const override |
| |
|
virtual string | getPluginName () const |
| | By default, the plugin name is the contact model name. Must be implemented in derived class.
|
| |
|
string | getProperties () const override |
| | Returns a comma delimited string that lists the contact model properies. Must be implemented in derived classes.
|
| |
| base::Property | getProperty (uint32 i, const IContact *con=0) const override |
| |
| bool | getPropertyGlobal (uint32) const override |
| |
| int | isProperty (const string &c) const override |
| |
| bool | setProperty (uint32 i, const base::Property &v, IContact *con=0) override |
| |
|
bool | getPropertyReadOnly (uint32) const override |
| |
|
bool | supportsInheritance (uint32) const override |
| |
|
bool | getInheritance (uint32) const override |
| |
|
void | setInheritance (uint32, bool) override |
| |
|
string | getMethods () const override |
| |
|
int | isMethod (const string &c) const override |
| | Processing of a methods based on the method list returned by getMehtods.
|
| |
|
string | getMethodArguments (uint32) const override |
| | Default implementation so that no methods must be defined.
|
| |
|
bool | setMethod (uint32, const std::vector< base::Property > &, IContact *c=0) override |
| | By default, no methods must be defined.
|
| |
|
string | getEnergies () const override |
| | Default implementation so that no energies must be defined.
|
| |
|
int | isEnergy (const string &c) const override |
| | Default implementation so that no energies must be defined.
|
| |
|
double | getEnergy (uint32) const override |
| | Default implementation so that no energies must be defined.
|
| |
|
bool | getEnergyAccumulate (uint32) const override |
| | Default implementation so that no energies must be defined.
|
| |
|
void | setEnergy (uint32, const double &) override |
| | Default implementation so that no energies must be defined.
|
| |
|
void | activateEnergy () override |
| | Default implementation so that no energies must be defined.
|
| |
|
virtual bool | getEnergyActivated () const |
| | Default implementation so that no energies must be defined.
|
| |
|
uint32 | getMinorVersion () const override |
| |
|
void | destroy () override |
| |
|
void | getSphereList (const IContact *, std::vector< DVect > *, std::vector< double > *, std::vector< double > *) override |
| | For contact specific plotting.
|
| |
|
void | getCylinderList (const IContact *, std::vector< DVect > *, std::vector< DVect > *, std::vector< double > *, std::vector< double > *, std::vector< double > *) override |
| | For contact specific plotting.
|
| |
|
virtual string | getFishCallEvents () const |
| | Return a comma delimited liest of FISH callback events.
|
| |
|
void | setEventVal (int i, int j) |
| | Set the order of the contact model events as stored in the ContactModelList.
|
| |
|
void | setFromParent (const ContactModel *cm) |
| | For executing events within the contact model.
|
| |
| void | setNonForcePropsFrom (IContactModel *) override |
| |
| uint32 | getPropertyIndex (const string &name) const |
| |
|
string | getPropertyName (uint32 index) const |
| | Utility function that returns the property name given it's index.
|
| |
|
void * | operator new (size_t size) |
| |
|
void * | operator new (size_t size, const char *file, unsigned line) |
| |
|
void | operator delete (void *v) |
| |
|
void | operator delete (void *v, const char *file, unsigned line) |
| |
|
virtual void | objectPropsTypes (std::vector< std::pair< string, InfoTypes > > *) const |
| |
|
virtual void | objectPropValues (std::vector< double > *, const IContact *) const |
| |
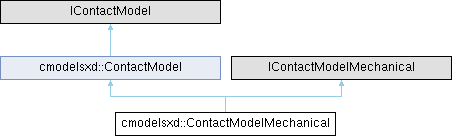
Mechanical contact model implementation.
 Public Member Functions inherited from cmodelsxd::ContactModel
Public Member Functions inherited from cmodelsxd::ContactModel